51
設計データを基に1/48のミニモデルを3D印刷してみました。
ハッチも開きます。
#アーカックス


52
レバー入力で腕動きました。
(速度は1/10程度に制限しています)
#アーカックス
53
設計データを基に1/24のミニモデルを3D印刷してみました。
ビークルモードにもなります。
#アーカックス




55
モード変形のシーケンスをテストしました。肩&ひじ→脇&前脚の順で動いています。
この速度でもコックピットの中にいると迫力あります。
#アーカックス
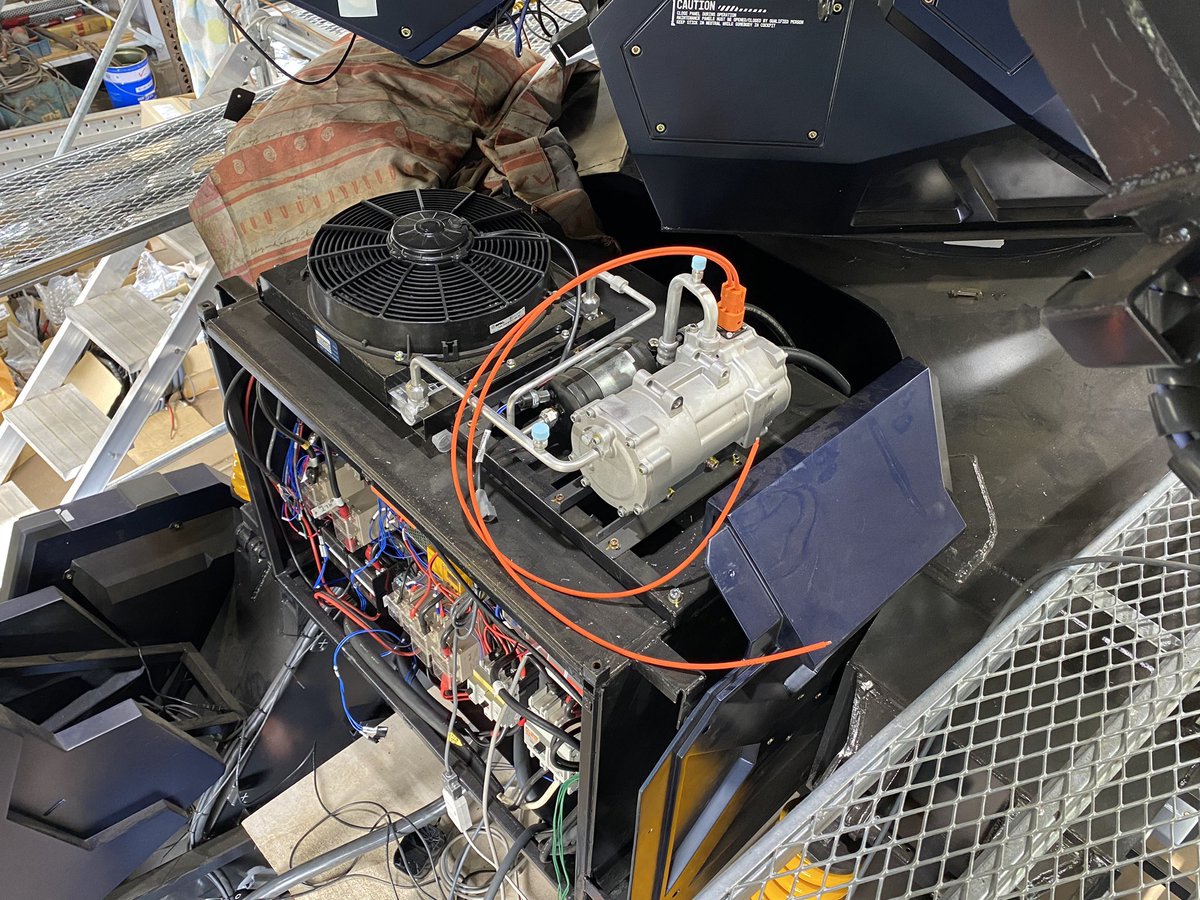
57
#アーカックス はクーラーを搭載しています。搭乗型ロボットとしては外せないポイントです。
自動車用は中々手に入らないため、産業車両用を採用しています。デバイス見つけるのが結構大変でした。

59
腰を回しきると、これくらいです。
(40°)
真横まで向けたい気持ちもありますが、各種配線やエアコン配管もあるので、今後の課題です。
#アーカックス


61
ビークルモードにしてみました。
同スケールのパイロットがいると、大きさをイメージしやすいですね。
#アーカックス twitter.com/Tsubame_HI/sta…

63
頭を乗せて光らせるとこんな感じです。
#アーカックス twitter.com/tsubame_hi/sta…

65
コックピット内の手許タッチパネル背面カバー(ロゴ入り)を3Dプリンタで製作しました。
こういうモノが手軽に作れるのはホントに便利です。
#アーカックス


70
少しですが走行しました.緊張しました.笑
(速度20mm/s,10倍速動画)
#アーカックス


72
本日はここまでモードチェンジの速度上げました.
スペック的にはこの4倍くらいまで速度アップ可能ですが,パイロットの体感も踏まえつつ調整したいと思います.
#アーカックス
73
同じ速度でビークルモードからロボットモードにも変形させました.
最後に両腕を前に突き出しますが,よりカッコ良い動きにしていきたいと考えています.
#アーカックス

75

