51
腰を回しきると、これくらいです。
(40°)
真横まで向けたい気持ちもありますが、各種配線やエアコン配管もあるので、今後の課題です。
#アーカックス

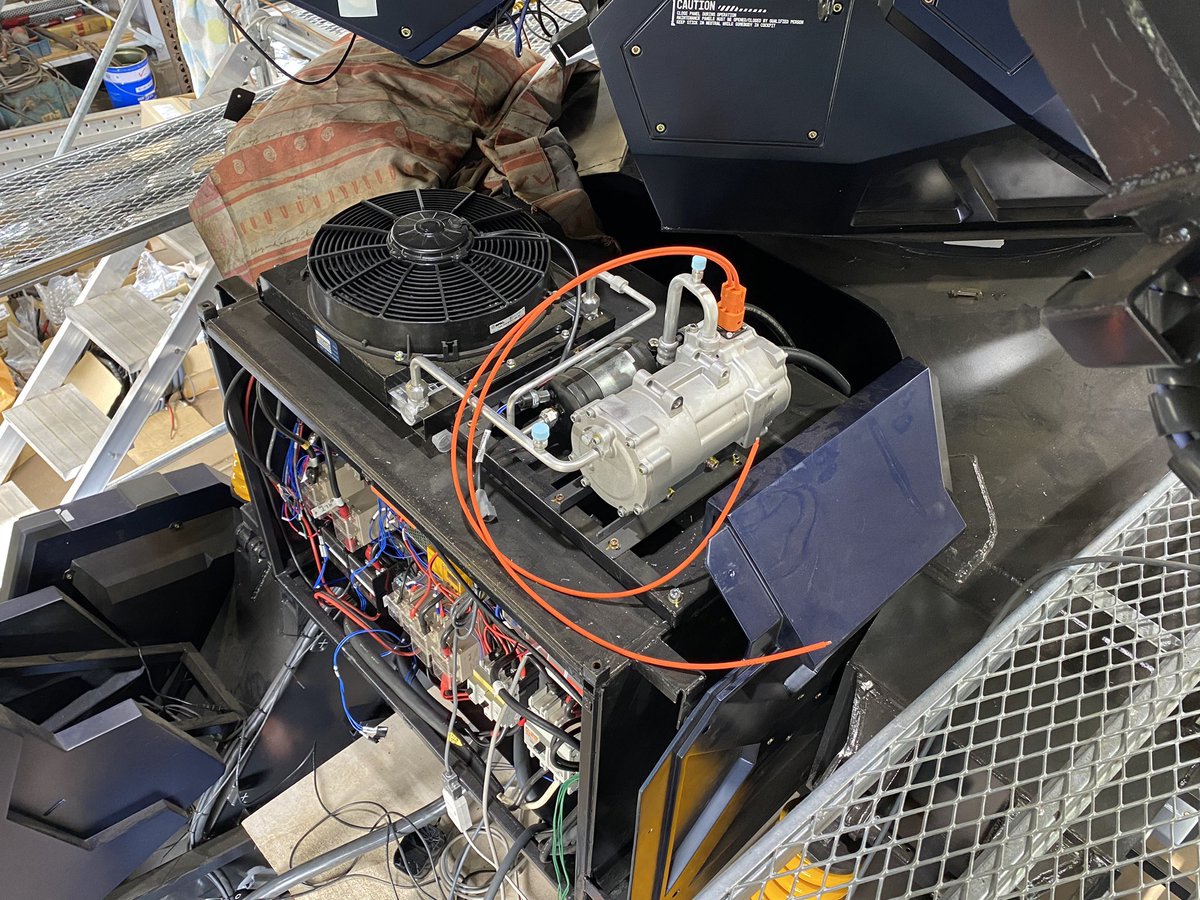
53
#アーカックス はクーラーを搭載しています。搭乗型ロボットとしては外せないポイントです。
自動車用は中々手に入らないため、産業車両用を採用しています。デバイス見つけるのが結構大変でした。

55
モード変形のシーケンスをテストしました。肩&ひじ→脇&前脚の順で動いています。
この速度でもコックピットの中にいると迫力あります。
#アーカックス
57
設計データを基に1/24のミニモデルを3D印刷してみました。
ビークルモードにもなります。
#アーカックス




58
レバー入力で腕動きました。
(速度は1/10程度に制限しています)
#アーカックス
59
設計データを基に1/48のミニモデルを3D印刷してみました。
ハッチも開きます。
#アーカックス


60
関節を個別に動かしてテストを行っているのですが、気付いたらファイティングポーズみたいになってました。笑
(前脚が上がっているのはウマに乗せているからです。)
#アーカックス


61
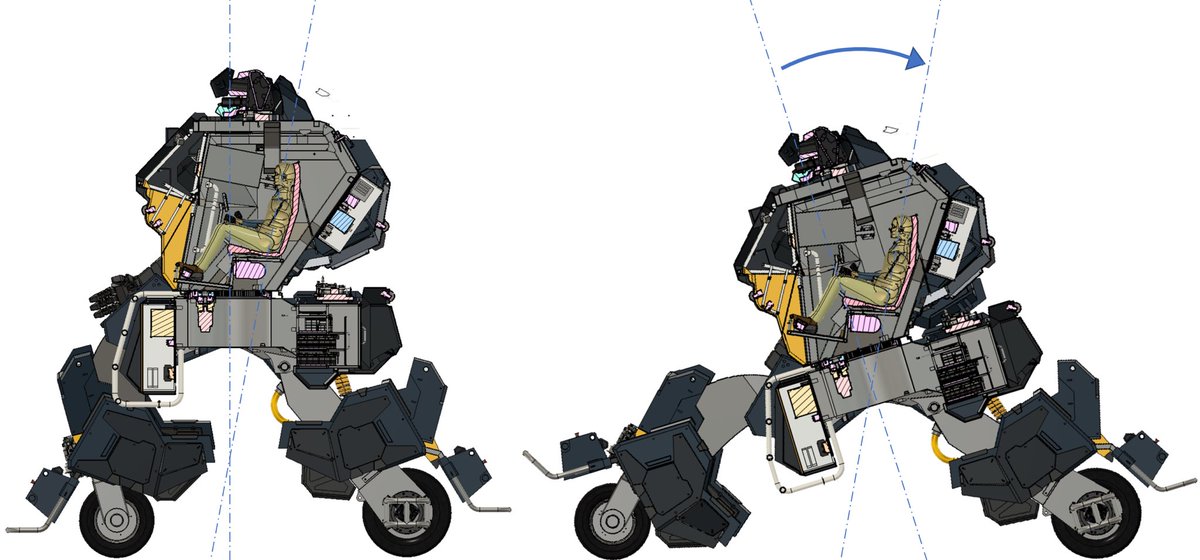
#アーカックス はロボットモードからビークルモードに移行時に
シートを傾けパイロットの姿勢を保ちます。
#ツバメインダストリ
63
ねとらぼさんの記事になりました。
#アーカックス twitter.com/itm_nlab/statu…
64
動作テストのため、前の足場を外しました。
頭と左ハンドも付いて、全体像が見えてきました。
#アーカックス


65
搭乗する時は #アーカックス をビークルモードにします。
モードチェンジにより前方ラダーが下方に降りてきます。手すり位置はVRで事前チェックしています。
67
#アーカックス は前脚を前に伸ばすことでモードチェンジします。前脚には電動シリンダを採用しています。
ロボットモードでは全身動作が可能で、ビークルモードでは移動に特化し時速10㎞まで出せるようになります。

68
電動ハッチもコックピット内から動作確認しました。
両手両脚の4カ所にあるSWを同時に押すことで開閉します。これによりハッチ開閉時の挟みこみを防止しています。
#アーカックス
69
#アーカックス のモニタ起動の様子です.
(※間を少し摘まんでます)
起動画面は暫定版で,これからギミック検討していきます.
70
ツバメインダストリ株式会社です
搭乗型ロボット #アーカックス を製作しています
#ツバメインダストリ
71
カメラが接続されました
#アーカックス は有視界操縦ではなく、
パイロットは9つのカメラ映像とUIから周囲の情報を取得します
#ツバメインダストリ



73
デザインのアクセントとして、動力パイプ的な外装パーツを付けています。
鋼管の曲げ加工で製作しています。
#アーカックス