1
AIさん、つま先・踵の動きを取り入れ、歩幅を広げた歩行を実現できました。以前作った膝伸ばし歩行と比べると、結構安定しています。(twitter.com/WatakoLab/stat…)
しかも、今回はバッテリーとコントローラを使って、完全無線なのだ!やっと、ここまできたぞー!
#プリメイドAIハック
2
アームは専用コントローラーで操作します。
ミニチュアのようになっており、コントローラーを真似るように動きます。
#プリメイドAIハック
twitter.com/shirokunet/sta…
3
ネットに接続して遠隔操作できるマスタースレーブを作りました。
ESP32からWifi接続、AWS IoT使ってMQTT通信。
マスター部分はプリメイドAIの上半身を流用。
遅延は100msecくらい。
※動画は4倍速です。
#プリメイドAIハック
4
AIさん、歩行チャレンジ。フラフラしとるけど…。
KinectV2から取得した私の歩行モーションを元に生成しています。それと、動画ではシミュレータなどど表現してますが、物理計算はまだ重心の算出程度。
私もロボティクスの勉強をしつつ、AIさんと共に成長するぞ。
#プリメイドAIハック
5
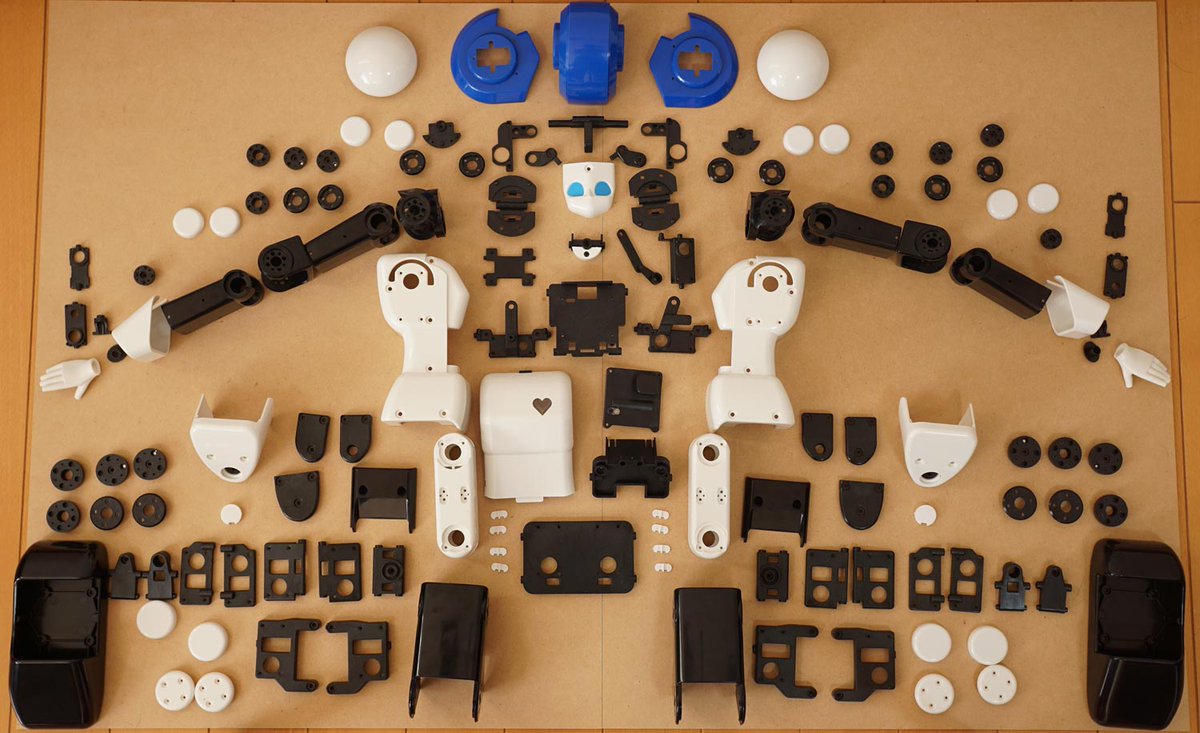
プリメイドAIを分解してみました、というお話。大分出遅れ感あるけど、やっと着手できた。
watako-lab.com/premaidai_disa…
#プリメイドAIハック