526
【TD1-R1-A】『星を掴む』
我々の着陸を拒むかのように、多数の岩塊に覆われたリュウグウ。
この未踏の地に降り立つため、我々は総力をあげて小惑星への降下技術を育ててきました。
527
例えば、
・到着前から何度も繰り返されたリアルタイム運用訓練
・安全と科学成果の最大化のため、工学・理学双方の意見を戦わせた着地点検討。
・誘導制御シーケンスの成立性のシミュレーションと機上確認
様々な経験を経て、我々は高度50mまで位置誤差10mで探査機を制御できるようになっています。
528
今回の降下の目的は『高度50m以下での航法誘導精度の確認』です。
タッチダウンのために必要な機器であり、近距離での高度計測を担当するLRF(レーザ・レンジ・ファインダ)の特性を把握する必要があります。
529
一足先に小惑星に向かったMINERVA-Ⅱ1やMASCOTからは、リュウグウ表面からのデータが続々と得られており、これらもタッチダウンに向けて重要な情報となっています。
530
「小惑星表面近傍で高い誘導精度を保ち、安全に星を掴む」
プロジェクトとしてはこれまで得られた様々な情報を全部使って、より確実で安全な運用を目指したいと考えています。
現在、直下点高度279m。
世界中からのエールを力に変えて、今日の運用成功を目指します!
(IES兄)
531
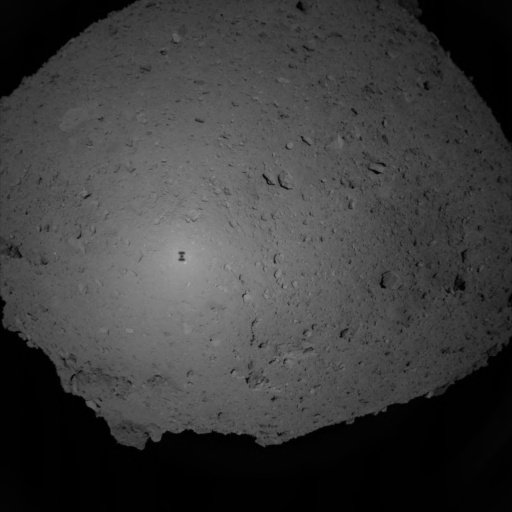
【TD1-R1-A】
10月15日 22:25 JST:探査機の直下点高度は244m。
(写真は21:53に受信した画像です)

532
【TD1-R1-A】今回の接近軌道は図の赤い線のようになっています。
MINERVAやMASCOTの時と比べ、より赤道に近いところに接近していきます。
※詳細は下記リンクの記事を参照ください。
hayabusa2.jaxa.jp/topics/2018101…

533
【TD1-R1-A】直下点高度は200mを切りました。
心のミラクルライトを振って応援ください。
(IES兄)
534
【TD1-R1-A】
地上受信時刻 22:21の画像です。
※TD1-R1-A運用 航法画像のリアルタイム配信はこちらから
hayabusa2.jaxa.jp/galleries/onc/…
536
【TD1-R1-A】
直下点高度、80m
プロジェクトメンバーが様々な表情を浮かべながら、皆モニタ見つめます。
537
【TD1-R1-A】そんなツイートを考えている間にも高度は下がります。
直下点高度、70m
(IES兄)
538
【TD1-R1-A】
直下点高度は50mを切りました。
Haya2NOWの航法カメラ略図もこんな状態です。
haya2now.jp

540
【TD1-R1-A】
探査機の上昇を確認しました。
詳細は今後の情報をお待ち下さい。

542
【TD1-R1-A】
目標としていた最下点高度に到達していたことがわかり、管制室では拍手が起こりました!!
探査機の状態は正常です。
543
【TD1-R1-A】
目標としていたLRFによる測距にも成功しました。
詳細情報は以下のとおりです。
・最下点到達時刻:10月15日 日本時間 22時44分。
・最下点高度:22.3m(LRF測距値より算出した高度)
現在の探査機高度は1.8kmです。
544
またひとつ、プロジェクトは強くなりました。
これからも明日へと続く道をひらきつづけます。
(IES兄)
545
【TD1-R1-A】
先ほどの航法画像(地上受信時刻 10月15日22:52JST)の地形を、L08領域の画像と対応させてみました。右の図が航法画像です。北を上にしています。
参考:記事「タッチダウン運用のスケジュール変更について」hayabusa2.jaxa.jp/topics/2018101…

546
【TD1-R1-A】10月16日 5:30JST: 先ほど深夜シフト終了のブリーフィングがありました。探査機の高度は10㎞を超えています。
今回の航法画像の配信はここで終了いたします。ご覧いただき、ありがとうございました。これは受信時刻2:55JSTの画像です。

547
週報を2回分掲載しました。
hayabusa2.jaxa.jp/news/status/
★2018.10.01の週★
9月30日からMASCOT分離運用の準備が始まりました。10月2日正午頃(日本時間)から降下開始し、10月3日 10:57:20に高度51mで分離しました。MASCOTはその後リュウグウ表面に着地し、約17時間にわたって活動を続けました。
(1/4)
548
.@JAXA_MMO みお、君ももうすぐ「第2宇宙速度倶楽部」の会員だよ。星巡りの旅を存分に楽しんで来て。
(IES兄)
549
Web記事更新のお知らせ
こちら「はやぶさ2」運用室 漫画版 Vol. 6: タッチダウン1 リハーサル1 (TD1-R1)
hayabusa2.jaxa.jp/topics/kochiha…


550
皆さんこんばんは。
本日から25日にかけて、3度目のタッチダウンリハーサルを実施します。今回のリハでは、
・LRF(レーザ・レンジ・ファインダ)による計測・制御
・条件成立後のターゲットマーカ分離
・ターゲットマーカの追跡
を行い、低高度での航法誘導制御精度の確認を行います。
(IES兄)
小惑星探査機「はやぶさ2」に関する情報などをお届けします。hayabusa2.jaxa.jp