1401
【TD1-R3】10月25日 12:06 JST:探査機が上昇に転じたことが確認されました。最下点付近では、低利得アンテナ(LGA)に切り替わっていましたのでテレメトリは取れていませんが、ドップラデータより探査機の視線方向速度がモニターできています。低高度での探査機の状況はこれから確認します。
1403
【TD1-R3】10月25日 11:00 JST:自律降下フェーズへの移行が「GO」となりました。探査機位置のx、y方向は引き続き地上からのコマンドで制御しますが、高度25mになると完全な自律モードに入ることになります。
高度は300mほどになりました。
1404
【TD1-R3】10月25日 10:35 JST:リュウグウまでの距離が500mを切りました。
1405
実況ライブ中継は11時から13時を予定しています。
実際の運用に合わせているため、お昼休みより早く始まってしまうのはご容赦ください。
中継は11時からですが、ノミナルでは12時半ちょっと前くらいから色々と確認が進む予定です。
ご検討ください。
(IES兄)
1406
ライブ配信では、管制室の中継に加え、プロジェクトメンバによる実況と解説(システム担当の今村さんと私IES兄、その他ゲスト)を予定しております。
同時通訳による英語での配信も行います。
HAYABUSA_Touchdown_Rehearsal LINK(英語)
youtu.be/v1w-3hMkkXE
(IES兄) twitter.com/haya2_jaxa/sta…
1407
【特別企画 実況パワフル管制室ライブ中継 11:00〜】
本日のタッチダウンリハーサルでは、管制室のライブ配信を行います。
※タッチダウン本番での情報発信のリハも兼ねています。
配信ページURLはこちら。
youtu.be/xgRtx1WMJQo
日本時間11時から実況開始です!
(IES兄)
1408
【TD1-R3】10月25日 9:10 JST:リュウグウまでの距離が約1000mになりました。
1409
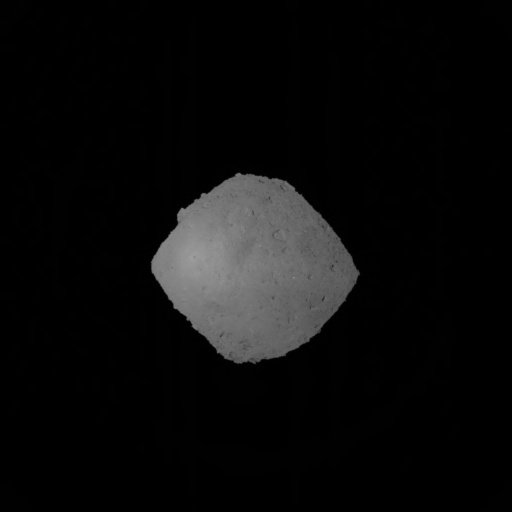
【TD1-R3】10月25日 7:50 JST:リュウグウまでの距離が1.5kmになりました。画像は、機上時刻7:30(JST)頃に撮影されたものです。
1410
【TD1-R3】10月25日 7:30 JST:夜間のシフトから、昼間のシフトに交代しました。管制室があるJAXA宇宙科学研究所では、朝焼けがきれいに見えました。
(先ほどのツイートで日付が1日ずれていました。申し訳ありません。)

1411
【TD1-R3】10月26日 6:35 JST:リュウグウまでの距離が2kmを切りました。
1412
【TD1-R3】10月25日 3:40 JST: LIDAR高度は約3kmです。リュウグウが自転して、目標地域L08-Bが探査機の下に近付いてきました。これからリュウグウがさらに1自転したところで、最接近になります。画像は、地上受信時刻 10/25 3:27(JST)の航法画像です。

1413
【TD1-R3】10月24日 22:20 JST:小惑星までの距離が6kmになりました。この距離まで降下するのは今回が8回目になります。
1414
【TD1-R3】10月24日 19:30 JST:リュウグウまでの距離が約10kmになりました。
管制室では、相変わらずリュウグウノツカイが陣取っています。今日のセリフは、制御チームメンバーの願望です。

1415
【TD1-R3】広角カメラONC-W1による航法画像のリアルタイム配信を開始しました。hayabusa2.jaxa.jp/galleries/onc/…
これは受信時刻10/24 18:48(日本時間)の航法画像です。
1416
【TD1-R3】今回のTD1-R3運用のスケジュール表を掲載しました。
hayabusa2.jaxa.jp/topics/2018102…



1417
【TD1-R3】10月24日 13:00 JST:探査機が計画どおりホームポジション(高度約20km)から降下を開始したことを確認しました。降下の速度は、これまでの降下運用と同様に秒速40cmです。
1418
【TD1-R3】10月24日 12:00 JST:3回目のタッチダウンリハーサルとなるTD1-R3の運用を実施するという判断がなされました。準備のための運用は昨日から開始されていましたが、本日、降下を開始することになります。
1419
小惑星への降下スタートは明日10月24日の13時頃、最下点到着は10月25日12時頃を予定しています。
※詳細は本日の記者会見資料を御覧ください。
hayabusa2.jaxa.jp/enjoy/material…
現在は明日の準備のため、スペイン・マドリッド局から はやぶさ2を追いかけています。
eyes.nasa.gov/dsn/dsn.html
(IES兄)
1420
皆さんこんばんは。
本日から25日にかけて、3度目のタッチダウンリハーサルを実施します。今回のリハでは、
・LRF(レーザ・レンジ・ファインダ)による計測・制御
・条件成立後のターゲットマーカ分離
・ターゲットマーカの追跡
を行い、低高度での航法誘導制御精度の確認を行います。
(IES兄)
1421
Web記事更新のお知らせ
こちら「はやぶさ2」運用室 漫画版 Vol. 6: タッチダウン1 リハーサル1 (TD1-R1)
hayabusa2.jaxa.jp/topics/kochiha…


1422
.@JAXA_MMO みお、君ももうすぐ「第2宇宙速度倶楽部」の会員だよ。星巡りの旅を存分に楽しんで来て。
(IES兄)
1423
週報を2回分掲載しました。
hayabusa2.jaxa.jp/news/status/
★2018.10.01の週★
9月30日からMASCOT分離運用の準備が始まりました。10月2日正午頃(日本時間)から降下開始し、10月3日 10:57:20に高度51mで分離しました。MASCOTはその後リュウグウ表面に着地し、約17時間にわたって活動を続けました。
(1/4)
1424
【TD1-R1-A】10月16日 5:30JST: 先ほど深夜シフト終了のブリーフィングがありました。探査機の高度は10㎞を超えています。
今回の航法画像の配信はここで終了いたします。ご覧いただき、ありがとうございました。これは受信時刻2:55JSTの画像です。

1425
【TD1-R1-A】
先ほどの航法画像(地上受信時刻 10月15日22:52JST)の地形を、L08領域の画像と対応させてみました。右の図が航法画像です。北を上にしています。
参考:記事「タッチダウン運用のスケジュール変更について」hayabusa2.jaxa.jp/topics/2018101…

小惑星探査機「はやぶさ2」に関する情報などをお届けします。hayabusa2.jaxa.jp