1426
またひとつ、プロジェクトは強くなりました。
これからも明日へと続く道をひらきつづけます。
(IES兄)
1427
【TD1-R1-A】
目標としていたLRFによる測距にも成功しました。
詳細情報は以下のとおりです。
・最下点到達時刻:10月15日 日本時間 22時44分。
・最下点高度:22.3m(LRF測距値より算出した高度)
現在の探査機高度は1.8kmです。
1428
【TD1-R1-A】
目標としていた最下点高度に到達していたことがわかり、管制室では拍手が起こりました!!
探査機の状態は正常です。

1430
【TD1-R1-A】
探査機の上昇を確認しました。
詳細は今後の情報をお待ち下さい。
1432
【TD1-R1-A】
直下点高度は50mを切りました。
Haya2NOWの航法カメラ略図もこんな状態です。
haya2now.jp

1433
【TD1-R1-A】そんなツイートを考えている間にも高度は下がります。
直下点高度、70m
(IES兄)
1434
【TD1-R1-A】
直下点高度、80m
プロジェクトメンバーが様々な表情を浮かべながら、皆モニタ見つめます。
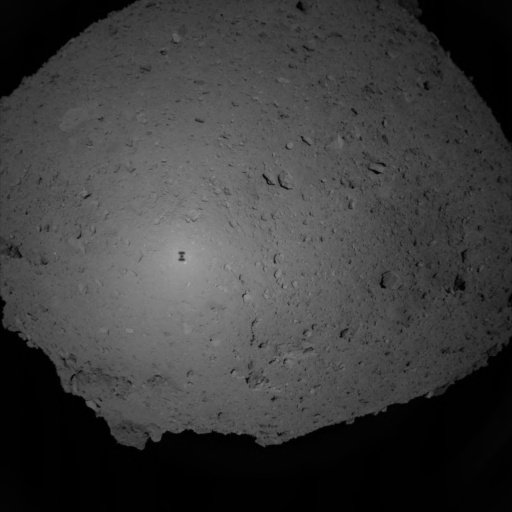
1436
【TD1-R1-A】
地上受信時刻 22:21の画像です。
※TD1-R1-A運用 航法画像のリアルタイム配信はこちらから
hayabusa2.jaxa.jp/galleries/onc/…
1437
【TD1-R1-A】直下点高度は200mを切りました。
心のミラクルライトを振って応援ください。
(IES兄)
1438
【TD1-R1-A】今回の接近軌道は図の赤い線のようになっています。
MINERVAやMASCOTの時と比べ、より赤道に近いところに接近していきます。
※詳細は下記リンクの記事を参照ください。
hayabusa2.jaxa.jp/topics/2018101…

1439
【TD1-R1-A】
10月15日 22:25 JST:探査機の直下点高度は244m。
(写真は21:53に受信した画像です)

1440
「小惑星表面近傍で高い誘導精度を保ち、安全に星を掴む」
プロジェクトとしてはこれまで得られた様々な情報を全部使って、より確実で安全な運用を目指したいと考えています。
現在、直下点高度279m。
世界中からのエールを力に変えて、今日の運用成功を目指します!
(IES兄)
1441
一足先に小惑星に向かったMINERVA-Ⅱ1やMASCOTからは、リュウグウ表面からのデータが続々と得られており、これらもタッチダウンに向けて重要な情報となっています。
1442
今回の降下の目的は『高度50m以下での航法誘導精度の確認』です。
タッチダウンのために必要な機器であり、近距離での高度計測を担当するLRF(レーザ・レンジ・ファインダ)の特性を把握する必要があります。
1443
例えば、
・到着前から何度も繰り返されたリアルタイム運用訓練
・安全と科学成果の最大化のため、工学・理学双方の意見を戦わせた着地点検討。
・誘導制御シーケンスの成立性のシミュレーションと機上確認
様々な経験を経て、我々は高度50mまで位置誤差10mで探査機を制御できるようになっています。
1444
【TD1-R1-A】『星を掴む』
我々の着陸を拒むかのように、多数の岩塊に覆われたリュウグウ。
この未踏の地に降り立つため、我々は総力をあげて小惑星への降下技術を育ててきました。
1445
【TD1-R1-A】日本時間21:56、探査機および地上系の情報を集計した結果、最下点(直下点高度約25m)への降下開始を「GO」と判断しました。
現在、探査機は、約418mの高度まで降下しています。
1446
【TD1-R1-A】10月15日 20:50 JST:探査機の高度は800mを切っています。写真は、20:23に受信した画像です。

1447
【TD1-R1-A】こぼればなし
管制室の真ん中にリュウグウノツカイが居座っています。
最初は単に飾ってあるだけでしたが、いつの間にかセリフを付けられたり、距離や降下速度のインジケータにされたりと、可愛がられています。
現在はハロウィンコスプレ中(しかも衣装はメンバーの手作り)
(IES兄)

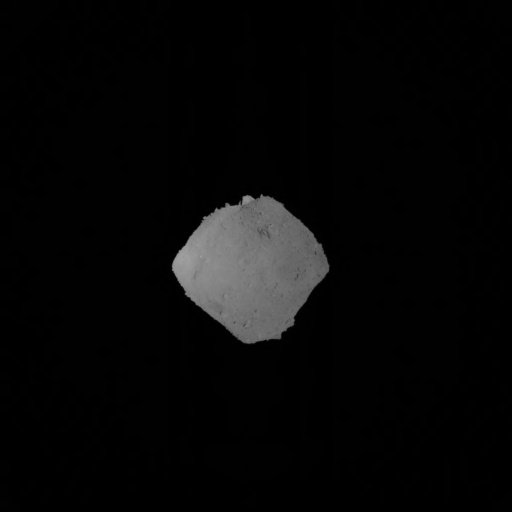
1448
【TD1-R1-A】10月15日 17:45 JST:探査機の高度は2000mを切りました。
探査機は未だ経験したことのない高度を目指して降下を続けています。
(画像は地上受信時刻 16:52のもの)
本日の運用スケジュールは下記リンクを御覧ください。日本時刻22時半頃に最下点到達予定です。
hayabusa2.jaxa.jp/topics/2018101…
1449
【TD1-R1-A】10月15日 11:15 JST:探査機の高度が4300mほどになりました。高度約5kmのところで、降下速度を秒速40cmから10cmに減速しました。
1450
【TD1-R1-A】10月15日 06:50 JST:探査機の高度が10kmを切りました。運用のシフトが、夜のシフトから朝のシフトに切り替わりました。
運用は予定どおりですが、航法画像のリアルタイム表示が止まっています。表示が再開するまでしばらくお待ちください。
小惑星探査機「はやぶさ2」に関する情報などをお届けします。hayabusa2.jaxa.jp