26
今回の動画、ちょっと面白いやも。
KinectV2から生成されたモーションを、ロボットにリアルタイムに適用して動かしています。
Kinectでのキャプチャと同時に動かせば、こちらの動きを真似っこしてくれるロボットに。
27
ホッパー君、色追尾と経路探索の合わせ技をば。
自分が通れない道をよけて回り込んだり、ロストしたボールを探しに行ったりします。
まだ動作がイケてない所がありますが、若干心折れそうなのでとりあえず現段階の進捗を…。
28
BirdBotのCAD、公開されてるんか…。
edmond.mpdl.mpg.de/dataset.xhtml?…
論文はこちら。補足資料を拝見するだけでもとても勉強になります…。
science.org/doi/10.1126/sc…
29
人間っぽい歩容生成アルゴリズム、それっぽくなりました。
ただ、幾何的にいい感じ、というだけで、まだ完全に自立して歩くことは出来ません。
(なので、後ろから軽く支えてます)
30
オリジナルロボット、ついにハードがほぼほぼ完成しました!
とりあえず、テスト動作。一番の売りは、両輪を面とする円柱の中に、バッテリー含めて全て収めたので、コロコロした動きができる事。これに9軸センサ含め、搭載した各種センサ情報を使って制御すれば、色んな面白い動きができるはず!
31
今回の動画は、ちょっと面白いかと…。
強めの外乱に対して、足を踏み出すことで転倒を回避します。
転倒可能性の判断や足踏み出し量の決定等、全て自律動作なところもポイント。
(解説続く)
32
支持脚側への転倒回避の導入をば。
結構人間ぽくなって、面白いなぁと感じました。
(転倒回避後、そのまま片足支持を保てているのもポイント)
34
二足ロボ、歩行に向けた解析環境が大分構築できました。
リアルタイムに取得したログから、実動作時の挙動を可視化しています。
(詳細続く)
35
36
AIさん、つま先・踵の動きを取り入れ、歩幅を広げた歩行を実現できました。以前作った膝伸ばし歩行と比べると、結構安定しています。(twitter.com/WatakoLab/stat…)
しかも、今回はバッテリーとコントローラを使って、完全無線なのだ!やっと、ここまできたぞー!
#プリメイドAIハック
37
AIさん、歩行チャレンジ。フラフラしとるけど…。
KinectV2から取得した私の歩行モーションを元に生成しています。それと、動画ではシミュレータなどど表現してますが、物理計算はまだ重心の算出程度。
私もロボティクスの勉強をしつつ、AIさんと共に成長するぞ。
#プリメイドAIハック
38
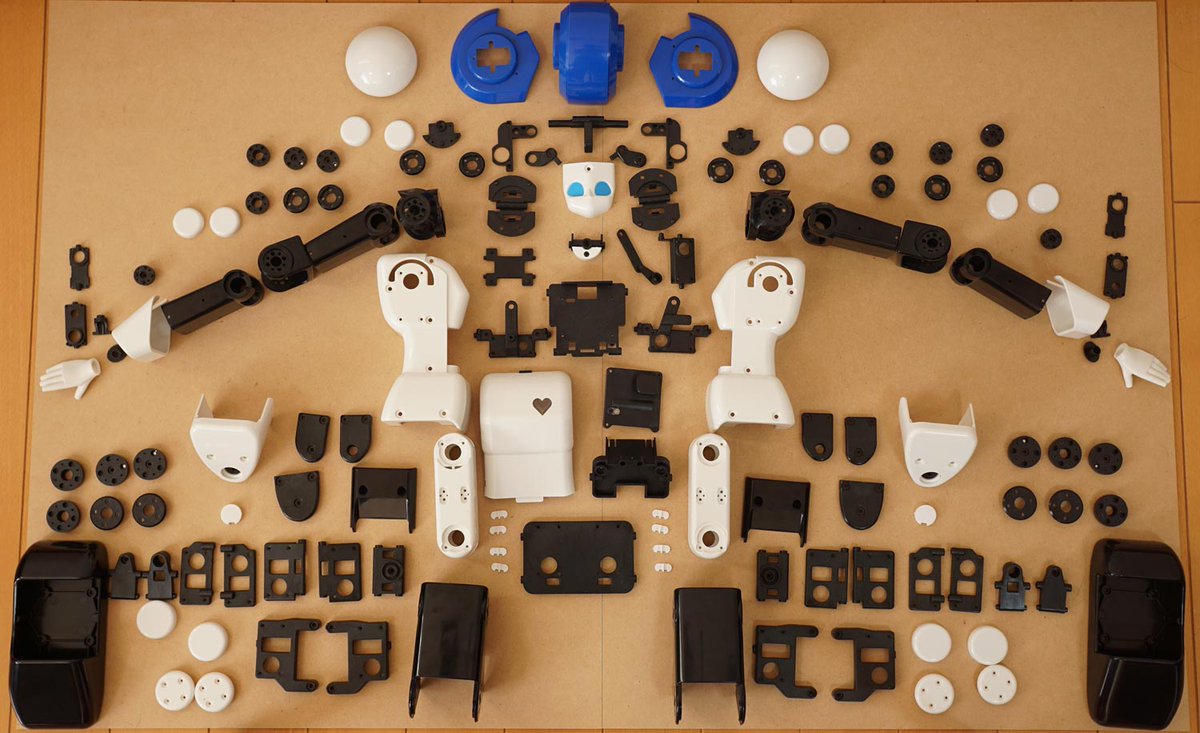
プリメイドAIを分解してみました、というお話。大分出遅れ感あるけど、やっと着手できた。
watako-lab.com/premaidai_disa…
#プリメイドAIハック


趣味ロボ、今は二足歩行ロボをば。人間らしい動きの実現を目指しています。