1651
運用状況週報 hayabusa2.jaxa.jp/topics/operati…
★「はやぶさ2」の状況(2018.7.16の週)★
先週は、一時的に高度約6kmまで降りる運用を行いました。接近してリュウグウのより詳細な観測を行いました。データのダウンリンクはこれからです。
(1/2)
1652
運用状況週報です。hayabusa2.jaxa.jp/topics/operati…
★「はやぶさ2」の状況(2018.7.9の週)★
ホームポジション(高度約20km)での運用が続いています。臼田局以外に海外局も使って、Ka帯でダウンリンクしたり、アップリンクトランスファーも行っています。(1/2)
1653
探査機から送られてくる電波のドップラーシフトからは、はやぶさ2が小惑星の重力を感じていることがわかります。はやぶさ2のリュウグウ探査1週目は順調な滑り出しです。
2018.7.9 Y.T.
(3/3)
1654
今週やったことは主に以下の2つです。
・小惑星上空20kmに精確にホバリングする技術の確立
・搭載の各種観測機器をリュウグウに向けて動作チェック
いずれも結果は良好。LIDAR(レーザー高度計)は小惑星対向で高度を計測し、Ka帯通信機はNASA深宇宙局を通じて高速でデータを送り始めました。(2/3)
1655
運用状況の週報をweb掲載しました。以下に転載します。
hayabusa2.jaxa.jp/topics/operati…
★「はやぶさ2」の状況(2018.7.2の週)★
リュウグウ到着後の第1週は私たちにとってあっという間でした。人類にとって
真新しい天体の風景をモニター越しに見ながらの探査機運用はなかなか乙です。(1/3)
1656
先ほどのStereophotoclinometry (SPC)モデルの画像が、左右反転の鏡像になっていました。申し訳ありません。修正版で再掲いたします。
1657
(GIFを1度に1つしか添付できないため、続けて投稿します)
先ほどの動画はStructure-from-Motion(SfM)の手法によるモデルでした。こちらはStereophotoclinometry (SPC)の手法によるモデルです。
hayabusa2.jaxa.jp/topics/2018071…
1658
Web記事を更新しました。
リュウグウの形状モデル初期バージョンが完成:リュウグウの形の推定をしています。現時点での形状モデルを紹介します。
hayabusa2.jaxa.jp/topics/2018071…
1659
Web記事を更新しました。
ホームポジションから見たリュウグウ
hayabusa2.jaxa.jp/topics/2018071…

1660
Webを更新しました。
これがリュウグウ - 3Dで見る全体像
hayabusa2.jaxa.jp/topics/2018071…
1661
近況報告:ここ数日、はやぶさ2運用では、到着後の各種機器の機能確認(衛星用語でいうチェックアウト)などをおこなっています。
小惑星から約20㎞離れた「ホームポジション」を維持しつつ、今後の観測のための準備もおこなっています。
1662
Web記事を更新しました。
イギリスのロックバンドのクイーンのギタリストであり天体物理学者でもある、ブライアン・メイ(Brian May)さんに、リュウグウの立体視用の画像を作っていただきました。
hayabusa2.jaxa.jp/topics/2018070…

1663
2018年6月27日(日本時間)のリュウグウ到着について、web記事を掲載しました。hayabusa2.jaxa.jp/topics/2018062…

1664
〈続き〉軌道制御を行ったときの探査機-小惑星の距離は約20.7km、TCM10後の探査機の小惑星に向かう相対速度は約0.01m/s(1cm/s)以下でした。
ついに、リュウグウに到着しました。
1665
光学電波複合航法における10度目の軌道制御(TCM10)を行いました。
これは“Arrival TCM”です。
2018年6月27日、09:30頃から09:35頃(日本時間)にかけて2回に分けてスラスタを噴射し、+x方向0.7cm/s、+z方向2.8cm/sほどの加速を行いました。〈続く〉
1666
イギリスのロックバンド、クイーンのブライアン・メイ @DrBrianMay さんに、リュウグウの写真を立体視用に加工していただきました。表面の凹凸が非常によく分かります。
Thank you very much! > Dr. Brian May twitter.com/DrBrianMay/sta…
1667
LIDAR(レーザ高度計)による距離計測に成功しました。詳しくは千葉工業大学の研究員ブログの6/26の記事をご覧ください。
perc.it-chiba.ac.jp/researcher
1668
さきほど書いた「7度目の軌道制御」は「9度目の軌道制御」の書き間違いでした。失礼しました。 twitter.com/haya2_jaxa/sta…
1669
光学電波複合航法における7度目の軌道制御(TCM09)を行いました。2018年6月26日、10:10頃から10:20頃(日本時間)にかけ数回スラスタを噴射し、-x方向0.8cm/s、+y方向0.3cm/s、+z方向10cm/sほどの加速を行いました。探査機-小惑星の距離は約23km、小惑星に向かう相対速度は約0.02m/s(2cm/s)でした。
1670
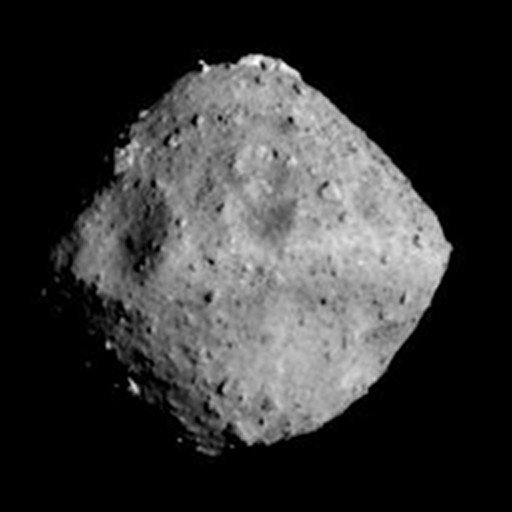
約40kmの距離から見たリュウグウ:リュウグウの表面のデコボコが見えてきました!
hayabusa2.jaxa.jp/topics/2018062…
1671
TCM08の実施を受けて、webの軌道情報を更新しました。(更新前の軌道情報より10kmほど遠くなっていることにご留意ください)
1672
光学電波複合航法における8度目の軌道制御(TCM08)を行いました。2018年6月24日、09:30頃から09:40頃(日本時間)にかけて数回スラスタを噴射し、+y方向0.2cm/s、+z方向2cm/sほどの加速を行いました。探査機-小惑星の距離は約38km、小惑星に向かう相対速度は約0.08m/s(8cm/s)でした。
1673
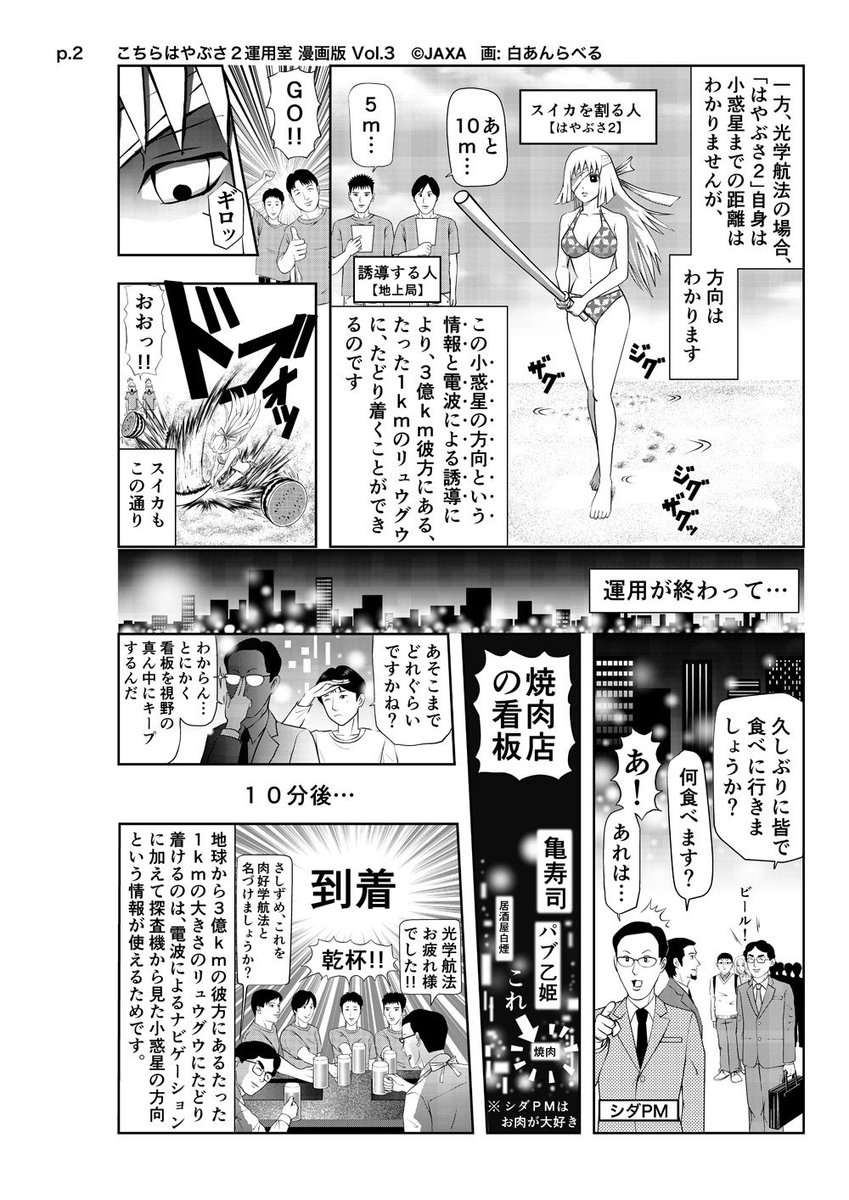
プロジェクトWebの [こちら「はやぶさ2」運用室 漫画版]を更新しました。 Vol.3: 光学電波複合航法(2018.06.22)
hayabusa2.jaxa.jp/topics/kochiha…

1674
webで表示している軌道をアップデートしました。
hayabusa2.jaxa.jp
1675
今回の軌道マヌーバにより、最終の垂直降下軌道に移行しました。あとはほぼまっすぐRyuguを目指します!
小惑星探査機「はやぶさ2」に関する情報などをお届けします。hayabusa2.jaxa.jp