


29
32
走行テスト実施しました.この動画で約1.5㎞/hです.
サイズが大きいので,速度以上に迫力あります.
#アーカックス
33
先週の補修作業はこんな感じでした.
外装保護のために布をかけていますが,洗濯物を干しているアニメの1シーンを思い出しました.笑
#アーカックス
34
効果音のテストで,ハッチ閉じる動画にSEを足してみました.(動画前半:SEアリ,後半:SEナシ)
上手く足せたら面白そうです.
#アーカックス
35
あおりで撮影するとこんな感じです。
アングルによって見え方が全然違うのも、大型ロボットの面白い特徴の1つだと思います。
#アーカックス

36
メカ関係の修正作業が完了しました。
来週から動作テスト再開します。
#アーカックス



38
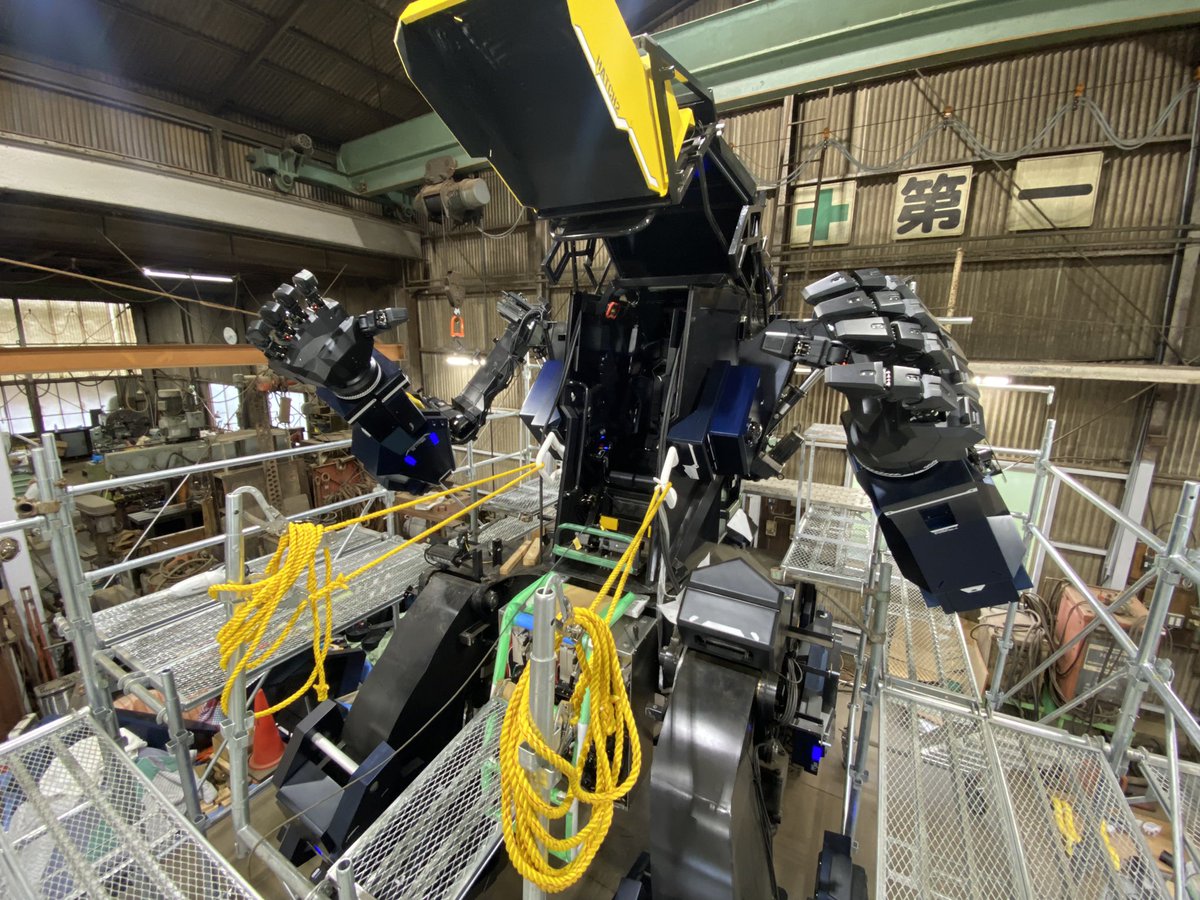
広角で上半身撮影しました。
肩と上腕の外装を外しているので、ポパイ的なフォルムになってます。

39
アーカックス(重量3.5t)の大きさをほぼ同じ重量のフォークリフトと比較するとこんな感じになります.
頑張って軽量化しました!

41
起動画面等への使用を見据えつつ,ワイヤフレーム動画を作成しました.
#アーカックス
42
アーカックスの腕内部フレームです。
手先負荷が小さいため、軽量化とコスト低減を考え、主に角パイプで構成しています。

43
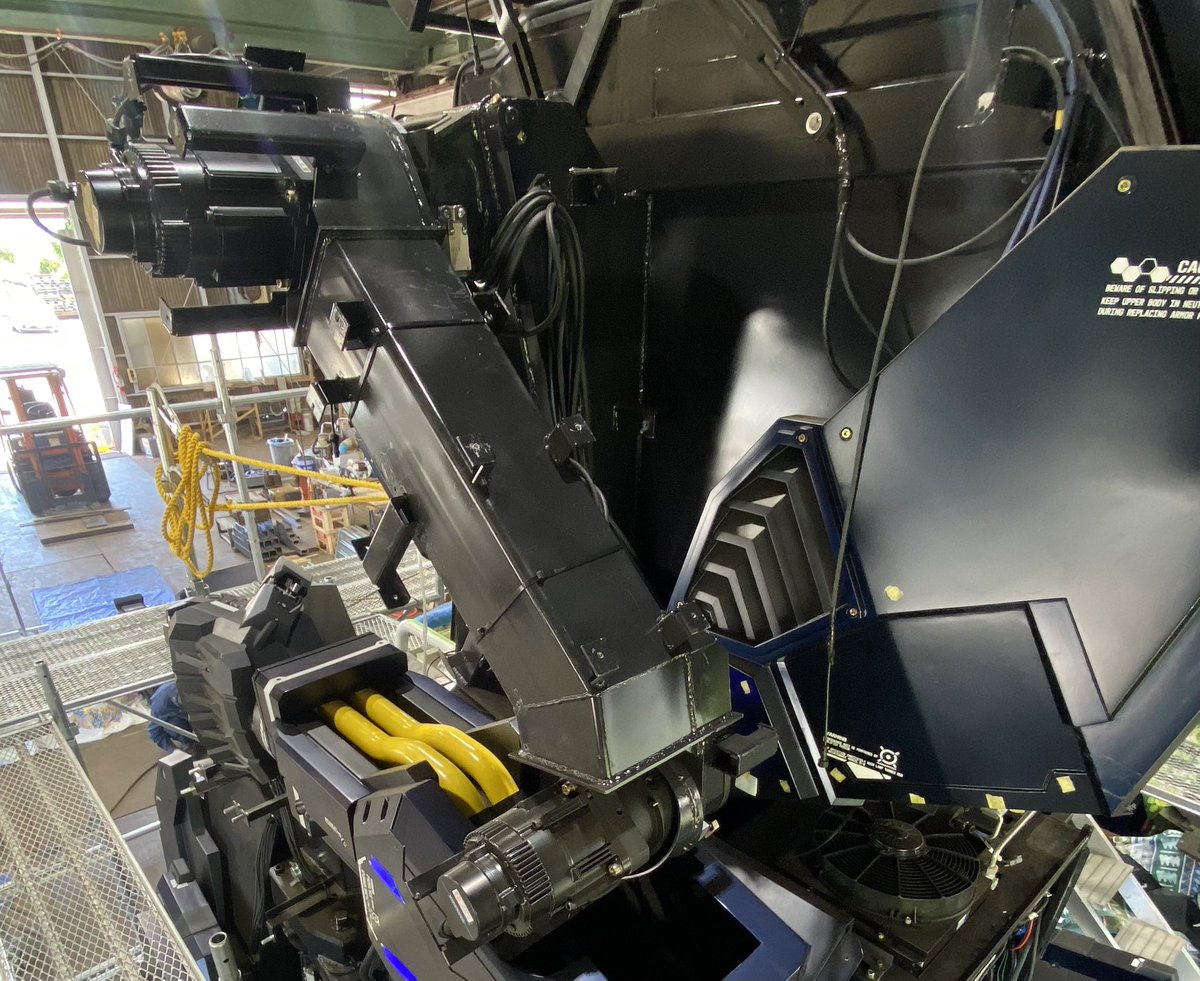
動作テストで明らかになった問題点を修正するため、上半身の外装を一部外しました。
久しぶりのフレーム姿です。
#アーカックス

44
このギミックは初期コンセプト動画を基に実装しています.
#アーカックス twitter.com/Tsubame_HI/sta…
45
アーカックスでは,パイロットが乗り込みやすいようハッチ開閉に合わせてシートが傾きます.
46
各部のクリアランスを確認して,可動範囲の調整を行いました.設計時に3D‐CAD上で検証してはいるのですが,やはり実際動かすと予想外の姿勢で接近したりします.関節数が多いと悩ましいところです...



47
アーカックスのモードチェンジ速度を上げました.約30秒で立ち上がります.
ひとまずこの速度で進めたいと思います.
50
アーカックス充電中!
中々のバッテリ容量なので,動作テストの合間にこまめに充電してます.


4.5m 3.5tの搭乗型ロボット「アーカックス」を作っている会社です 2023年夏 プロトタイプ公開予定 開発記録は「#アーカックス」 We are a company developing a piloted robot #Archax. English account : @TsubameInds_en