1
世界初となる、ヘビ型ロボットによるはしご昇降を実現し、本日のImPACT TRC 第五回フィールド公開評価会にてデモンストレーションを行いました。
フル動画をYouTubeにアップしています。
youtu.be/kN9AIQQZRw4
2
続きまして、ヘビ型ロボットによる配管上のフランジ乗り越えです。
フル動画はこちら
youtu.be/qMxPdsquKdM
3
受賞決定の際に日本機械学会からリクエストがあり、僕の「ヘビ型ロボットによる複雑環境上での移動制御の研究」を1分間で紹介する動画を作成しました。ぜひご覧ください。
4
シドニーで行われたRoboCup世界大会のRescue Robot Leagueで優勝しました。研究室のチームとしては初優勝、日本のチームでは14年ぶりの成果です。大会の様子について軽めに書きました。
RoboCup世界大会2019 優勝! - メカトロニクスにうってつけの日 tattatatakemori.hatenablog.com/entry/2019/07/… #はてなブログ
5
【初めて作ったロボット紹介】
大学1年のときに「ライントレーサーを作れ」という最初の課題にテンプレで答えたくなくて、センサ2つだけ使った単純なアルゴリズムを考案した。回転を始めて135度以内のラインを無視することで十字路を突破できるところがミソ。
7
#Twitter転職
京都大学で研究員をしています。
ロボットの研究開発が得意です。
今後はアカデミックを離れ、エンジニアとしてロボット開発を仕事にしたいと思い、来年度からの転職先を探しています。
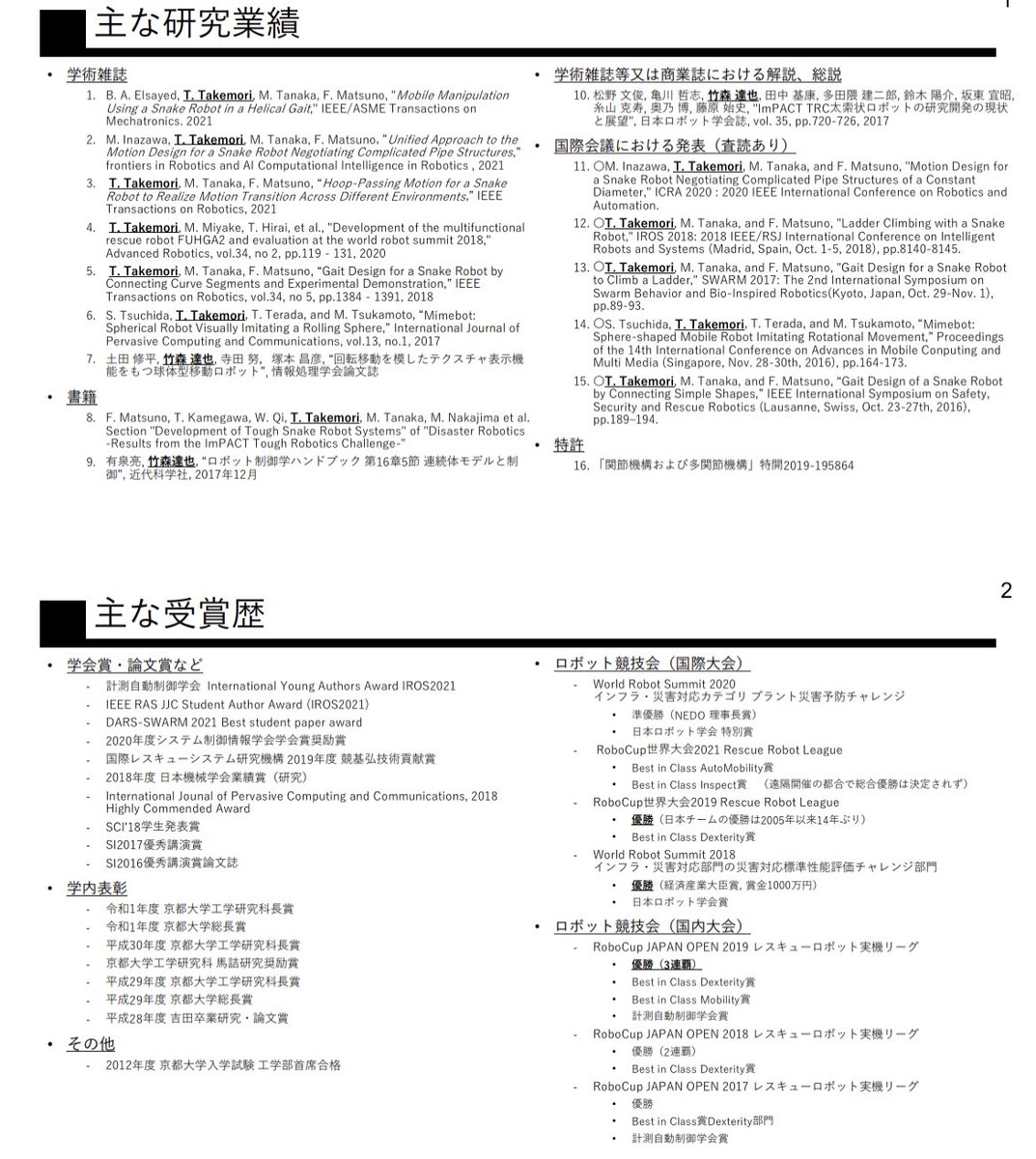
主な業績や開発実績は画像をご覧ください。
アリだと思われたらDMかメールをいただければ幸いです。



8
人機一体のデモ。零式人機 ver2.0。
高いところで固定されてない棒をロボットの手持ちで振り回すの、確かな成功率ないとできひんと思うしすごい完成度と自信。
#国際ロボット展
9
Kawasakiの四足歩行搬送用ロボットBexのデモ。人乗れるレベルの可搬能力すごい。Spotとかの潮流に対して、自律機能とかは一旦置いといてとにかくこのサイズ感でパワフルに物運べることに特化してる印象。不思議な外装。
#国際ロボット展
10
僕のヘビロボ研究の集大成的な論文がIEEE Transaction on Roboticsに採択され、Early Accessでweb公開されました。
断面形状が未知で変化する配管上で、巻きつく体型を関節ごとレベルで細かく自律適応させる制御を実現しました。必要なフィードバックは関節角のみという。
ieeexplore.ieee.org/document/98340…
Rhizomatiks エンジニア 2022.4〜/ロボティクス×エンタメ・アート/京都大学メカトロニクス研究室 博士卒/お笑いとラジオと漫画とボードゲームなどが好き